Two-Deflector Model
The base model makes a sharp asymmetry: the sail is treated as a momentum deflector acting on a column of air, while the centreboard is given infinite lateral resistance — leeway is forbidden by assumption. That is equivalent to giving the water-foil infinite area.
This note removes that assumption. The centreboard is modelled as a finite lifting surface whose side-force grows with leeway angle, introducing leeway $\alpha$ as a second equilibrium variable alongside boat speed $v$.
Coordinate frame
| symbol | meaning |
|---|---|
| $x’$ | along the boat’s heading (positive = forward) |
| $y’$ | across the boat (positive = to leeward) |
| $\theta$ | heading angle from true wind |
| $\alpha$ | leeway angle (drift to leeward, $\alpha > 0$) |
The boat’s actual track over water is $\theta + \alpha$ from the wind.
Forces
The sail and hull drag follow the same momentum-flux framework as the base model, but now we track both components of the sail force. The centreboard operates in a regime where the momentum-flux model fails, so it is treated as a finite lifting surface instead.
Step 1 — Sail: how much air is intercepted?
The sail presents projected area $a_s|\sin\theta|$ to the wind (zero head-to-wind, full area beam-reaching). In one second a column of air of length $v_s$ sweeps past this cross-section, delivering mass flux:
\[\dot{m} = \rho_a \, a_s \, v_s \, |\sin\theta|\]This is identical to the base model; the derivation is in Step 1 of the base-model appendix.
Step 2 — Sail: forward force ($x’$ component)
Define unit vectors in the boat’s frame. The wind velocity in world coordinates is $(0,-v_s)$. The forward unit vector is $\hat{x}’ = (\sin\theta,\cos\theta)$.
Incoming: the component of wind velocity along $\hat{x}’$:
\[v_\text{in,fwd} = (0,-v_s)\cdot(\sin\theta,\cos\theta) = -v_s\cos\theta\](negative: the wind opposes the heading for $\theta < 90°$).
Outgoing: the sail deflects the air to leave along $+\hat{x}’$ at speed $D_s v_s$, so $v_\text{out,fwd} = +D_s v_s$.
Applying the no-go-zone constraint (see base model Step 2 for the full argument), the net forward drive is:
\[\boxed{F_{\text{sail},x'} = \rho_a \, a_s \, v_s^2 \, |\sin\theta|(D_s - \cos\theta)}\]Positive only for $\theta > \arccos D_s \approx 26.5°$.
Step 3 — Sail: leeward force ($y’$ component)
The leeward unit vector in world coordinates is $\hat{y}’ = (\cos\theta,-\sin\theta)$ (90° clockwise from $\hat{x}’$).
Incoming: the component of wind velocity along $\hat{y}’$:
\[v_\text{in,lwd} = (0,-v_s)\cdot(\cos\theta,-\sin\theta) = +v_s\sin\theta\](positive: the beam component of the wind pushes the boat to leeward).
Outgoing: after the sail the air exits axially (along $\hat{x}’$), so it carries zero leeward velocity: $v_\text{out,lwd} = 0$.
The air has shed leeward momentum $\dot{m}\,v_s\sin\theta$; by Newton’s third law the boat gains it:
\[\boxed{F_{\text{sail},y'} = \rho_a \, a_s \, v_s^2 \, \sin^2\!\theta \qquad \text{(leeward)}}\]This is the term the base model discards by assuming infinite lateral resistance.
Step 4 — Why the momentum-flux model fails for the centreboard
Applying the deflector formula directly. We could attempt to treat the centreboard as a deflector of the sideways water flow, exactly as the sail deflects air. The water approaches the centreboard at leeway angle $\alpha$ to the board’s chord. Substituting $\alpha$ for $\theta$ and a centreboard momentum-retention coefficient $D_c$ for $D_s$ in the sail formula gives:
\[F_\text{cb,windward}^\text{deflector} = \rho_w \, A_c \, v^2 \, |\sin\alpha|(D_c - \cos\alpha)\]For this to be positive (a windward restoring force) we need $D_c > \cos\alpha$, i.e.:
\[\alpha > \arccos(D_c)\]A well-made centreboard has $D_c \approx 0.98$ (only 2 % of the water’s momentum absorbed by friction), giving $\arccos(0.98) \approx 11.5°$.
At realistic leeway angles of 1–3°, $\cos\alpha \approx 0.9998 > D_c$, so $D_c - \cos\alpha < 0$: the formula predicts a leeward push — the centreboard makes the drift worse rather than better. The momentum-flux model does not merely underestimate the side-force; it gets the sign wrong at every angle a real boat actually sails.
Why the deflector model gets the physics wrong. The sail acts as a deflector because it genuinely redirects a column of air through a large angle (30°–70°): the incoming air has a substantial component perpendicular to the exit direction, and the momentum change is the dominant source of force. Pressure differences play a secondary role.
A centreboard at 1–3° leeway is in a completely different regime. At $\alpha = 2°$ only $\sin 2° \approx 3.5\%$ of the water velocity is directed toward the board’s face; the remaining 99.4% flows along the chord. The board does not meaningfully redirect this flow. Instead, the streamlined profile shifts the stagnation point slightly, causing the flow to accelerate on the suction face and decelerate on the pressure face. By the Kutta–Joukowski theorem, this pressure difference generates a force perpendicular to the flow even though the flow is barely deflected at all. The mechanism is circulation, not momentum redirection.
Summary of the two regimes:
| Deflector (sail) | Lifting surface (centreboard) | |
|---|---|---|
| Physical mechanism | momentum redirection | circulation / pressure difference |
| Side-force scales as | $\sin\theta\,(D - \cos\theta)$ | $\sin\alpha \approx \alpha$ |
| No-force zone | $\theta < \arccos D_s \approx 26°$ | none for $\alpha > 0$ |
| Reliable range | large angles (30°–70°) | small angles ($\lesssim 10°$) |
Thin aerofoil theory captures the circulation mechanism analytically and is valid when:
- The foil is thin relative to its chord ($t/c \lesssim 0.12$ for a dinghy board).
- The angle of attack is well below stall ($\alpha \lesssim 10°$; typical leeway is 1–3°).
- The flow is approximately inviscid away from the boundary layer: at $v = 2$ m/s and chord $c \approx 0.3$ m the chord Reynolds number is $Re \approx 6\times10^5$, well into the turbulent-attached regime where potential-flow theory is accurate.
Step 5 — Centreboard lift
Due to leeway $\alpha$ the water approaches the centreboard at angle of attack $\alpha$ to its chord line. The dynamic pressure is $q = \tfrac{1}{2}\rho_w v^2$.
Thin aerofoil theory for an infinite (2D) flat plate gives (Glauert 1926; Anderson 2017 §4.7):
\[C_L = 2\pi\sin\alpha \approx 2\pi\alpha\]The approximation holds well for $\alpha < 5°$. The resulting windward restoring force is:
\[\boxed{F_{\text{cb},y'} = q\,A_c\,C_L = \pi\rho_w A_c \sin\alpha \cdot v^2 \qquad \text{(windward)}}\]Dimensional check:
$[\pi\rho_w A_c \sin\alpha \cdot v^2]
= \text{(kg\,m}^{-3}\text{)(m}^2\text{)(m}^2\text{s}^{-2}\text{)}
= \text{N}$
Step 6 — Centreboard induced drag
A centreboard has finite span $b$ and aspect ratio $\mathrm{AR} = b^2/A_c$ (typically $\approx 6$). Prandtl’s lifting-line theory (Prandtl 1918; Anderson 2017 §5.3) shows that any finite wing generating lift must also generate induced drag — a drag penalty caused by trailing vortices that tilt the local lift vector aft. For an elliptical lift distribution (Oswald efficiency $e = 1$, a good approximation for a tapered board):
\[C_{D,i} = \frac{C_L^2}{\pi \cdot \mathrm{AR}}\]Substituting $C_L = 2\pi\sin\alpha$:
\[C_{D,i} = \frac{(2\pi\sin\alpha)^2}{\pi \cdot \mathrm{AR}} = \frac{4\pi\sin^2\!\alpha}{\mathrm{AR}}\]This induced drag opposes forward motion ($-x’$ direction):
\[\boxed{F_{\text{cb},x'} = -q\,A_c\,C_{D,i} = -\frac{2\pi\rho_w A_c \sin^2\!\alpha}{\mathrm{AR}}\,v^2}\]For $\mathrm{AR} = 6$ and $\alpha = 2°$ at $v = 2.5$ m/s this is roughly $0.05$ N — a small but real drag penalty that reduces upwind speed slightly below the one-deflector prediction.
Step 7 — Hull drag
Unchanged from the base model (see base model Step 3):
\[F_{\text{hull}} = -(1-D_h)\,\rho_w\,A_h\,v^2\]Equilibrium
Setting net forward and leeward forces to zero simultaneously gives two equations in the unknowns $(v, \alpha)$ for each heading $\theta$.
Forward balance (Steps 2, 6, 7):
\[\underbrace{\rho_a a_s v_s^2 \sin\theta(D_s-\cos\theta)}_{\text{sail drive}} = \underbrace{\frac{2\pi\rho_w A_c \sin^2\!\alpha}{\mathrm{AR}}\,v^2}_{\text{CB induced drag}} + \underbrace{(1-D_h)\rho_w A_h v^2}_{\text{hull drag}} \tag{1}\]Leeward balance (Steps 3, 5):
\[\underbrace{\rho_a a_s v_s^2 \sin^2\!\theta}_{\text{sail side-force}} = \underbrace{\pi \rho_w A_c \sin\alpha \cdot v^2}_{\text{CB lift}} \tag{2}\](Hull side-drag is small compared with centreboard side-force and is ignored.)
Eliminating $v^2$. Solve equation (2) for $v^2$:
\[v^2 = \frac{\rho_a a_s v_s^2 \sin^2\!\theta}{\pi\rho_w A_c \sin\alpha} \tag{$2'$}\]Substitute into equation (1) and divide through by $\rho_a a_s v_s^2$:
\[\pi A_c (D_s - \cos\theta)\sin\alpha = \sin\theta\!\left[\frac{2\pi A_c \sin^2\!\alpha}{\mathrm{AR}} + (1-D_h)A_h\right] \tag{3}\]This single transcendental equation in $\alpha$ can be solved for any $\theta$.
Small-leeway approximation. For $\alpha \ll 1$ the quadratic term $\sin^2!\alpha \approx 0$ and equation (3) linearises to:
\[\alpha \approx \frac{(1-D_h)\,A_h\,\sin\theta}{\pi A_c (D_s - \cos\theta)} \tag{4}\]For the Laser Pico at $\theta = 57°$:
\[\alpha \approx \frac{0.1\times0.0343\times\sin 57°}{\pi\times0.125\times(0.895-\cos 57°)} \approx 1.2°\]matching the full numerical result — confirming that induced drag is negligible at these small leeway angles, and that a larger centreboard area $A_c$ directly reduces leeway (equation 4 shows $\alpha \propto 1/A_c$).
Once $\alpha$ is found from equation (3), $v$ follows from equation ($2’$).
Limiting case: infinite centreboard. As $A_c \to \infty$, equation (2) forces $\sin\alpha \to 0$ and the induced-drag term in equation (1) vanishes, recovering the one-deflector speed formula exactly.
Results for the Laser Pico


Left: heading $\theta$ (grey) vs actual track $\theta+\alpha$ (green) at the optimal angle. Right: full force breakdown — sail drive and leeward push (blue/purple), centreboard lift balancing the leeward push (green), combined drag opposing forward motion (red).
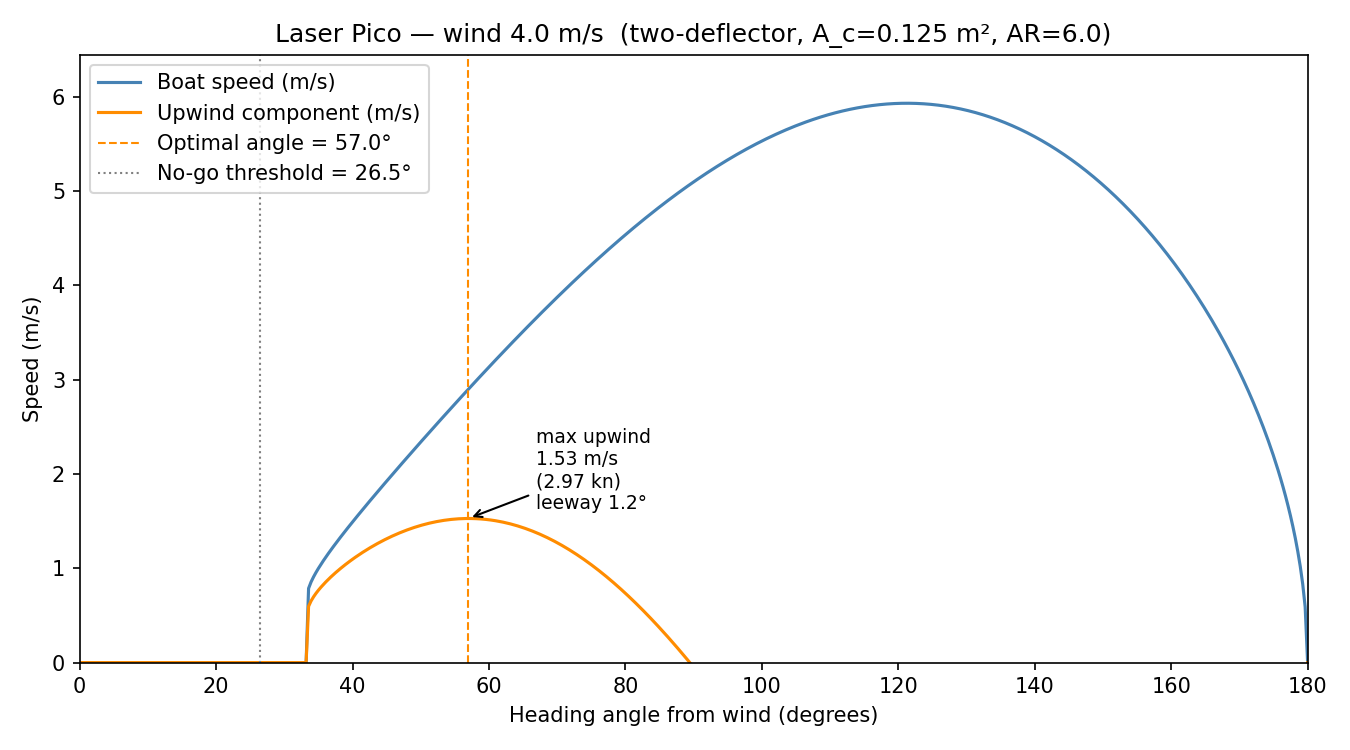
Boat speed and upwind component vs heading. The annotation shows the maximum upwind speed, the corresponding optimal heading, and the leeway angle at that point.
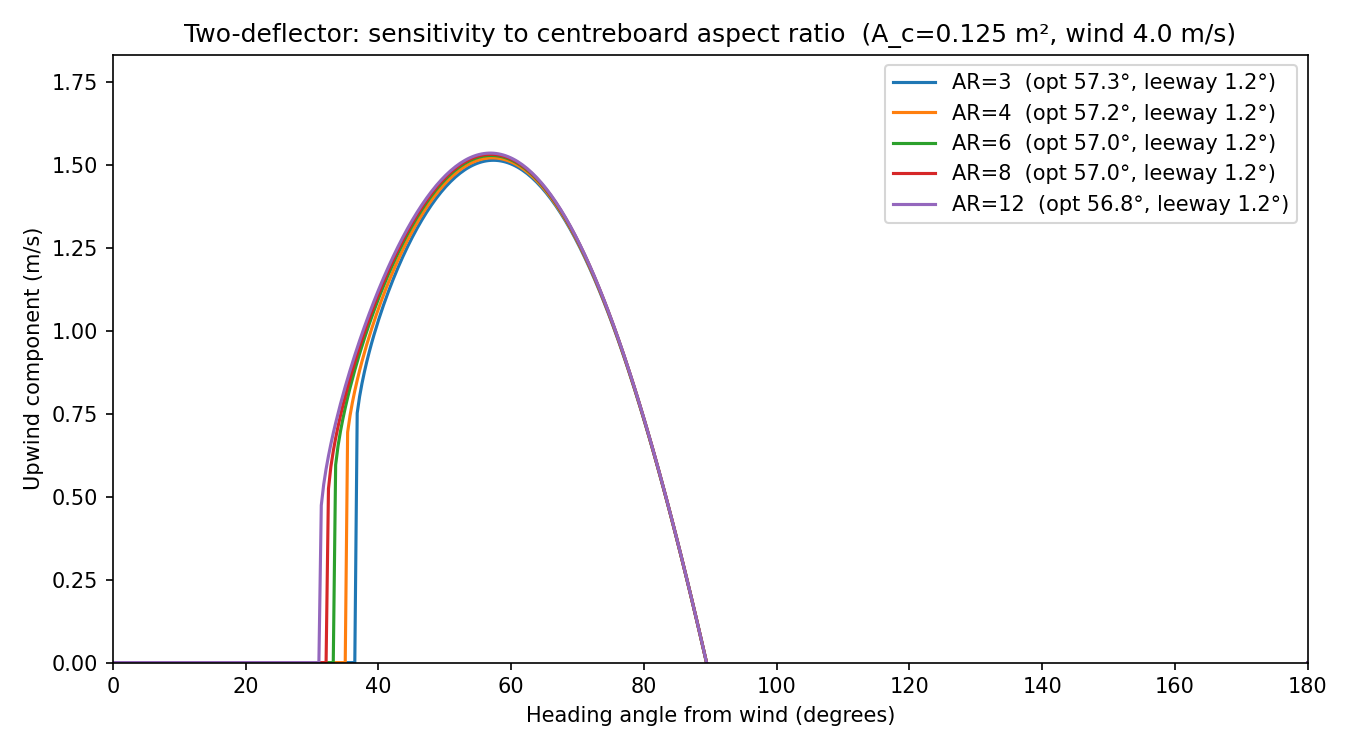
Upwind component vs heading for centreboard aspect ratios AR ∈ {3, 4, 6, 8, 12} (centreboard area $A_c = 0.125$ m² fixed). Higher AR → less induced drag → slightly higher upwind speed and marginally narrower optimal heading.
Centreboard: $A_c = 0.125\ \text{m}^2$, $\mathrm{AR} = 6$.
| $\theta$ (°) | $v$ (m/s) | $\alpha$ (°) | $u = v\cos(\theta+\alpha)$ (m/s) |
|---|---|---|---|
| 33 | 0.76 | 7.7 | 0.57 |
| 45 | 1.92 | 2.0 | 1.31 |
| 56 | 2.85 | 1.2 | 1.53 |
| 62 | 3.29 | 1.0 | 1.49 |
| 73 | 4.12 | 0.8 | 1.11 |
Optimal heading: $\theta_\text{opt} = 57.0°$, leeway $\alpha = 1.2°$, effective track $58.2°$ from wind.
True upwind speed: 1.53 m/s (2.97 knots).
Compared with the one-deflector model ($\theta_\text{opt} = 56.8°$, $u_\text{max} = 1.59$ m/s), the optimal heading is virtually unchanged — confirming that the base model’s closed-form cubic gives the right answer to good accuracy. The upwind speed is slightly lower because centreboard induced drag adds a small forward-resistance penalty.
Sensitivity to centreboard size
| $A_c$ (m²) | $\theta_\text{opt}$ (°) | Leeway (°) | $u_\text{max}$ (m/s) |
|---|---|---|---|
| 0.05 | 57.3 | 3.1 | 1.43 |
| 0.10 | 57.1 | 1.5 | 1.51 |
| 0.125 | 57.0 | 1.2 | 1.53 |
| 0.20 | 57.0 | 0.8 | 1.55 |
| 0.30 | 57.0 | 0.5 | 1.57 |
| 1.00 | 56.8 | 0.2 | 1.59 |
As $A_c \to \infty$ the leeway $\to 0$ and the result converges to the one-deflector model, as expected. Smaller centreboard → more leeway → more induced drag → lower upwind speed and a very slightly wider optimal heading, consistent with the intuition that a boat with a poor centreboard should bear away slightly.
What the model still cannot do
- The sail side-force ($F_{\text{sail},y’}$) in this derivation assumes air exits axially — a rough approximation that over-states the leeward push at very large $\theta$. A full 2-D deflector would require tracking the exit direction of the air.
- Hull side-drag (the water resistance opposing leeway from the hull itself, not just the centreboard) is ignored.
- Heel angle and its effect on effective sail area and underwater body are ignored.
- The thin-plate $C_L = 2\pi\alpha$ formula holds only for small $\alpha$ and attached flow — reasonable for $\alpha < 5°$ but the model should not be trusted at larger leeway.
Code
The model lives in
sailing_upwind/two_deflector.py.
To run the full model and regenerate all plots and diagrams, use the CLI (config is managed by Hydra — any config key can be overridden on the command line):
# Default Laser Pico parameters
python -m sailing_upwind
# Try a stronger wind
python -m sailing_upwind wind.speed_ms=7
# Larger centreboard with higher aspect ratio
python -m sailing_upwind model.centreboard.area_m2=0.20 model.centreboard.aspect_ratio=8
To use the two-deflector model for the main upwind-speed plot:
python -m sailing_upwind model.mode=two_deflector
Or call the Python API directly:
from sailing_upwind.two_deflector import TwoDeflectorParams, optimal_angle
p = TwoDeflectorParams(
v_s=4.0, # wind speed m/s
a_s=5.1, # sail area m^2
rho_a=1.225,
D_s=0.895, # sail drag coefficient
A_c=0.125, # centreboard area m^2
AR_c=6.0, # centreboard aspect ratio
D_h=0.9, # hull drag coefficient
rho_w=1000.0,
A_h=0.0343, # hull frontal area m^2
)
theta_opt, v_opt, alpha_opt = optimal_angle(p)
References
-
Glauert, H. (1926). The Elements of Aerofoil and Airscrew Theory. Cambridge University Press. (Classic derivation of $C_L = 2\pi\alpha$ for a thin flat plate using potential flow theory; the essential reference for Step 5 above.)
-
Prandtl, L. (1918). Tragflügeltheorie I & II. Nachrichten von der Gesellschaft der Wissenschaften zu Göttingen, Mathematisch-Physikalische Klasse, 451–477 and 107–137. (Original lifting-line theory giving $C_{D,i} = C_L^2/(\pi\,\mathrm{AR})$; available in English translation as NACA Technical Report No. 116, 1921.)
-
Anderson, J. D. (2017). Fundamentals of Aerodynamics (6th ed.). McGraw-Hill. §§4.7, 5.3. (Accessible textbook treatment of thin aerofoil theory and Prandtl’s lifting-line theory with worked examples.)
-
Wolfe, J. (2002). The physics of sailing. University of New South Wales. Link (Momentum-flux treatment of the sail force that underpins both models.)